
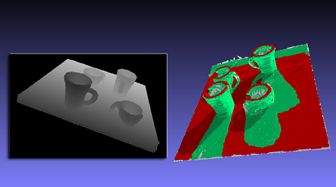
 We propose a method that extends a given depth image into regions in 3D that are not visible from the point of view of the camera. The algorithm detects repeated 3D structures in the visible scene and suggests a set of 3D extension hypotheses, which are then combined together through a global 3D MRF discrete optimization.
We propose a method that extends a given depth image into regions in 3D that are not visible from the point of view of the camera. The algorithm detects repeated 3D structures in the visible scene and suggests a set of 3D extension hypotheses, which are then combined together through a global 3D MRF discrete optimization.
A collaboration with Simon Korman and Prof. Shai Avidan of Tel Aviv University.