
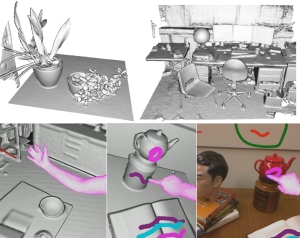
 This project investigates techniques to track the 6DOF position of handheld depth sensing cameras, such as Kinect, as they move through space and perform high quality 3D surface reconstructions for interaction. Other collaborators (missing from the list below): Richard Newcombe (Imperial College London); David Kim (Newcastle University & Microsoft Research); Andy Davison (Imperial College London)
This project investigates techniques to track the 6DOF position of handheld depth sensing cameras, such as Kinect, as they move through space and perform high quality 3D surface reconstructions for interaction. Other collaborators (missing from the list below): Richard Newcombe (Imperial College London); David Kim (Newcastle University & Microsoft Research); Andy Davison (Imperial College London)